Замена контроллера полета Hubsan X4 107L

Шаг 1 Отключить и удалить аккумулятор
Крепко возьмитесь за обе стороны разъема аккумулятора и вытащите их.
Возьмите аккумулятор и вытащите его из корпуса квадрокоптера.



Шаг 2 Удалить амортизаторы
Сориентируйте квадрокоптер так, чтобы пропеллеры находились внизу.
Снимите резиновые амортизаторы с опор двигателя вручную.



Шаг 3 Удалить пропеллеры
Используйте инструмент для удаления опоры, чтобы оторвать пропеллеры от двигателей.
Винты «А» находятся на переднем левом и заднем правом двигателях.
Винты "B" находятся на переднем правом и заднем левом двигателях.



Шаг 4 Удалить послепродажного крепежа
Используйте кусачки, чтобы удалить любые индивидуальные или вторичные модификации, удерживающие корпус вместе.

Шаг 5 Удалить винты PH000
С помощью отвертки Phillips # 000 удалите три винта, которые крепят нижнюю часть корпуса к раме.



Шаг 6 Защелкивающаяся нижняя часть кузова
Аккуратно надавите вверх на одно из плеч двигателя, изгибая корпус вниз, чтобы освободить нижнюю часть подмышки.
Повторите этот шаг для всех четырех рук. Нижняя часть тела будет отделена от основной рамы после того, как четвертый рычаг будет снят с места.


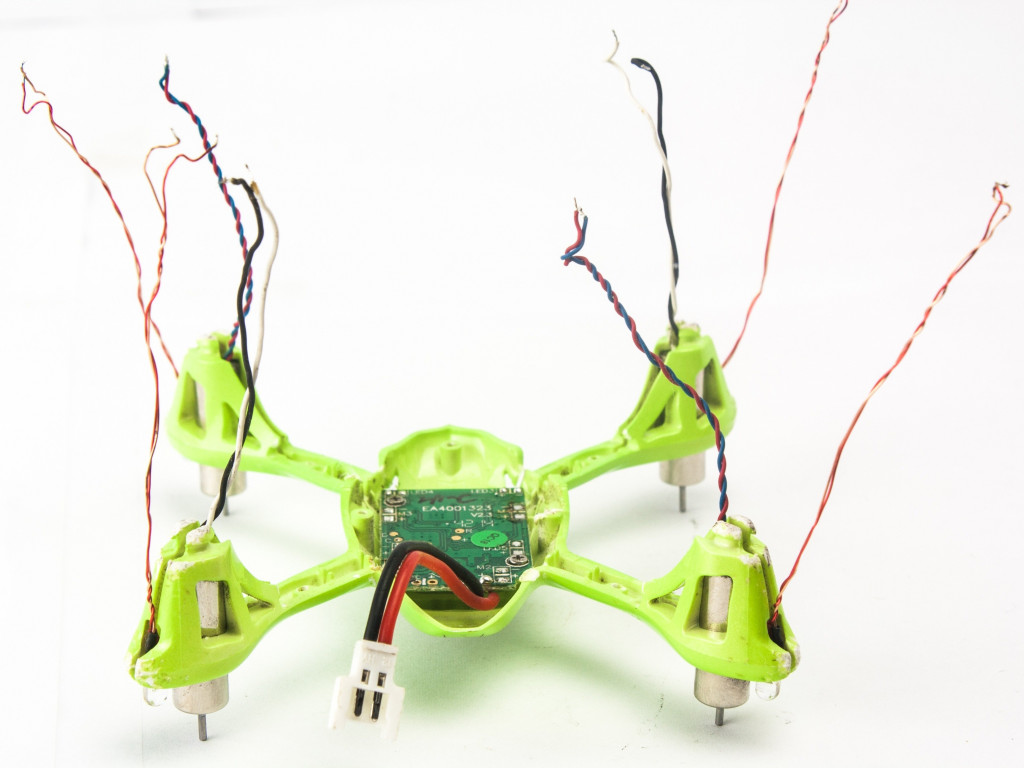
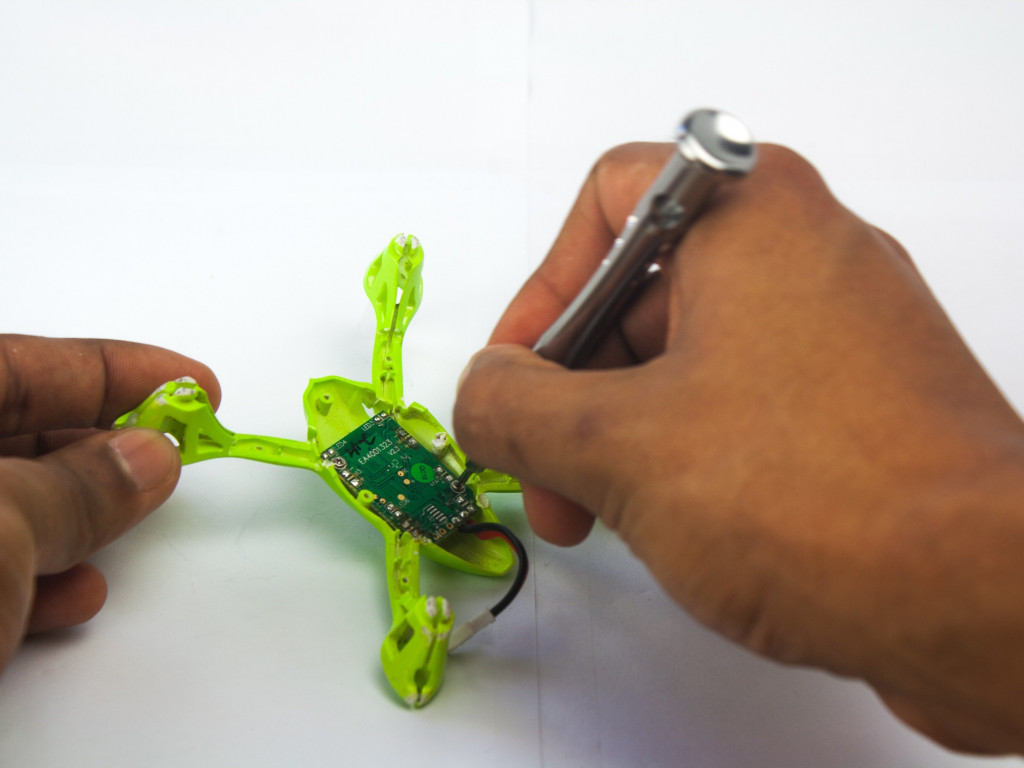
Шаг 7 Десолдер Моторс от Flight Controller
Используйте паяльник и фитиль припоя, чтобы удалить четыре двигателя с платы управления.
Если соединение сохраняется даже после удаления припоя из соединения, осторожно потяните за провод, одновременно нагревая соединение, пока провод не отделится от платы.
Шаг 8 Desolder светодиоды от контроллера полета
Используя технику, аналогичную демонтажу проводов двигателя, отсоедините светодиоды от платы управления.
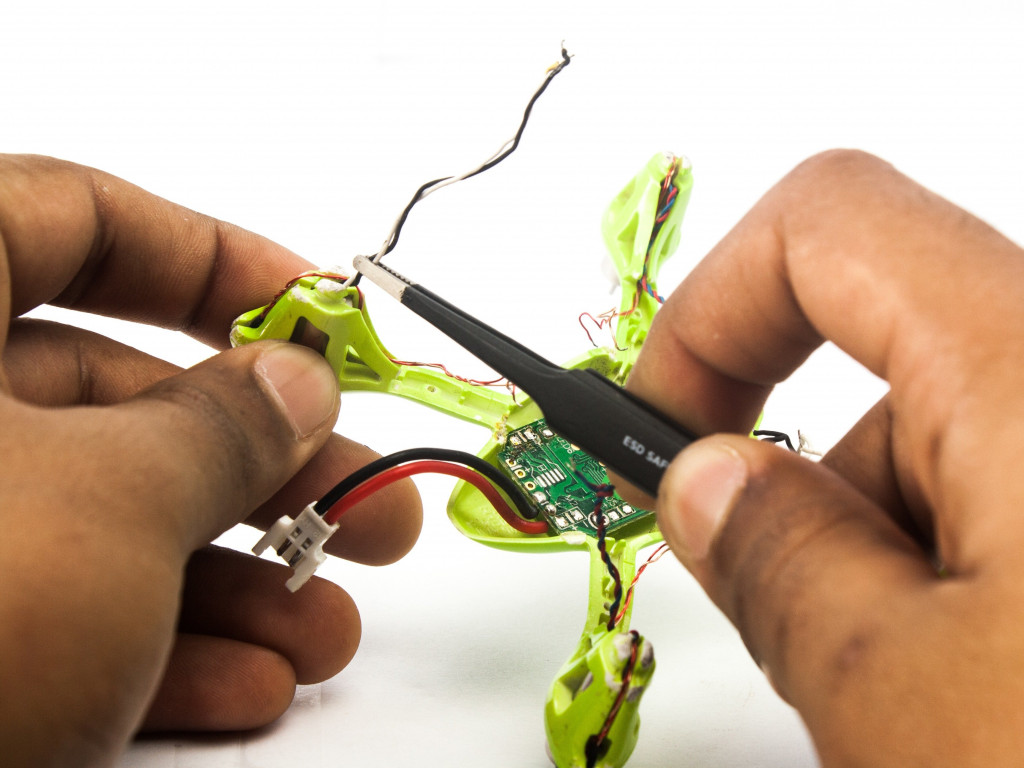
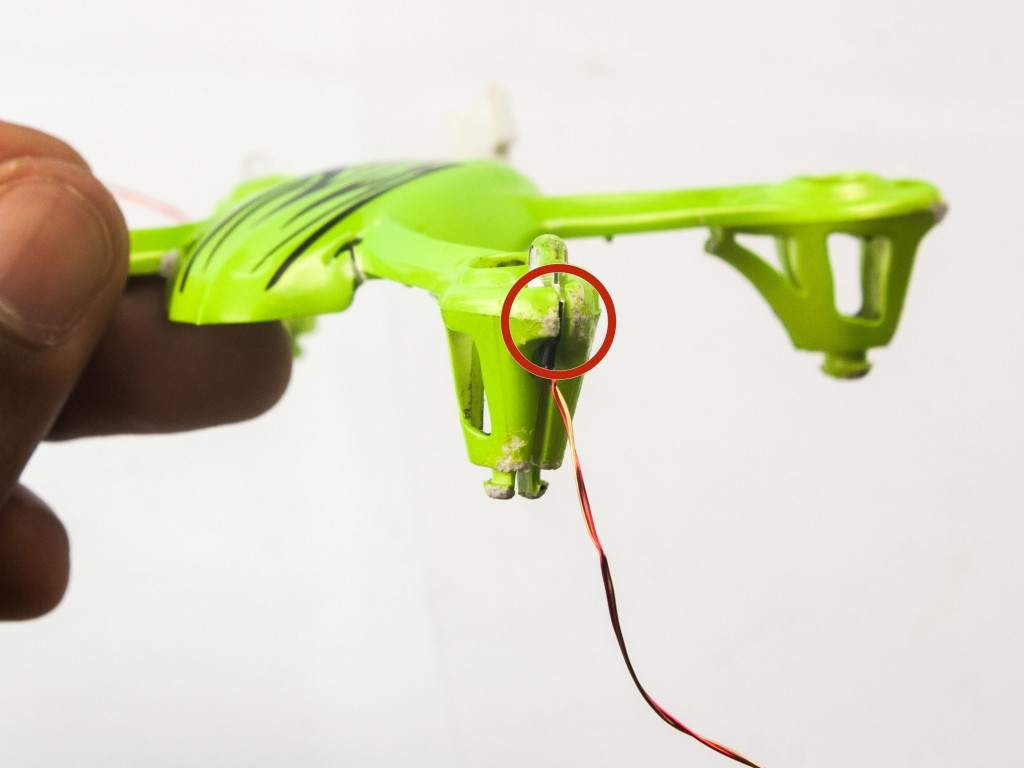
Шаг 9 Освободите провода от рамы
Используйте пинцет, чтобы отсоединить мотор и светодиодные провода от рычагов квадрокоптера.

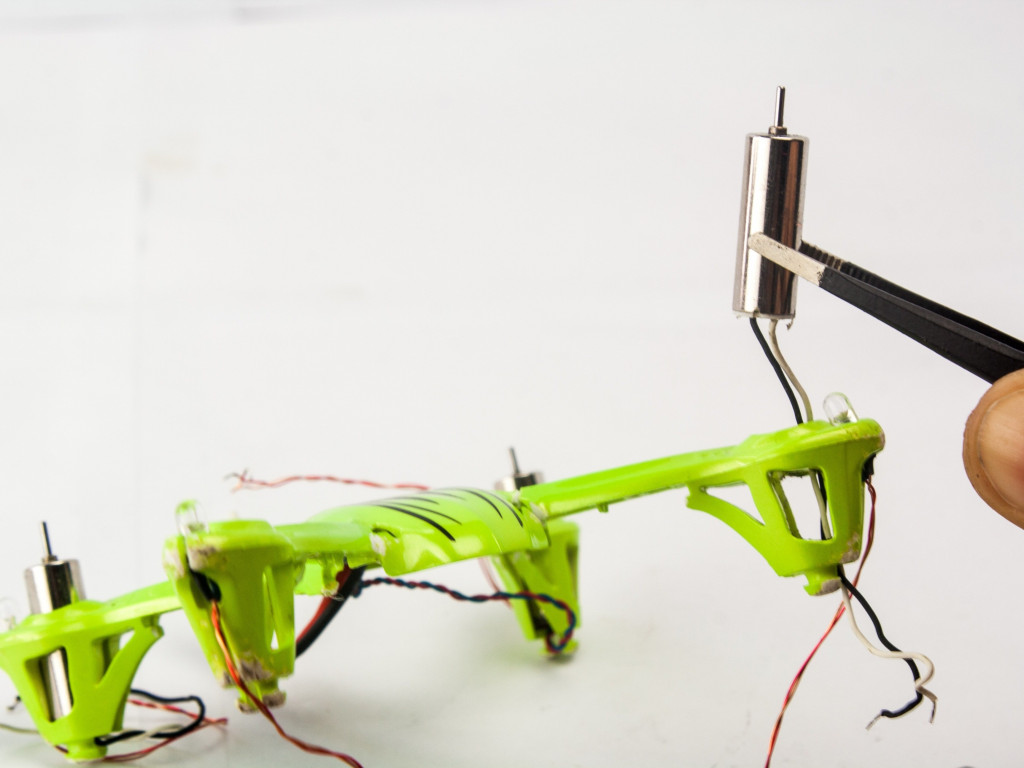
Шаг 10 Удалить Моторс
Используйте пинцет, чтобы вытолкнуть моторы из своих корпусов.
Когда двигатель в основном выходит из крепления двигателя, возьмитесь за него сверху и вытяните прямо.


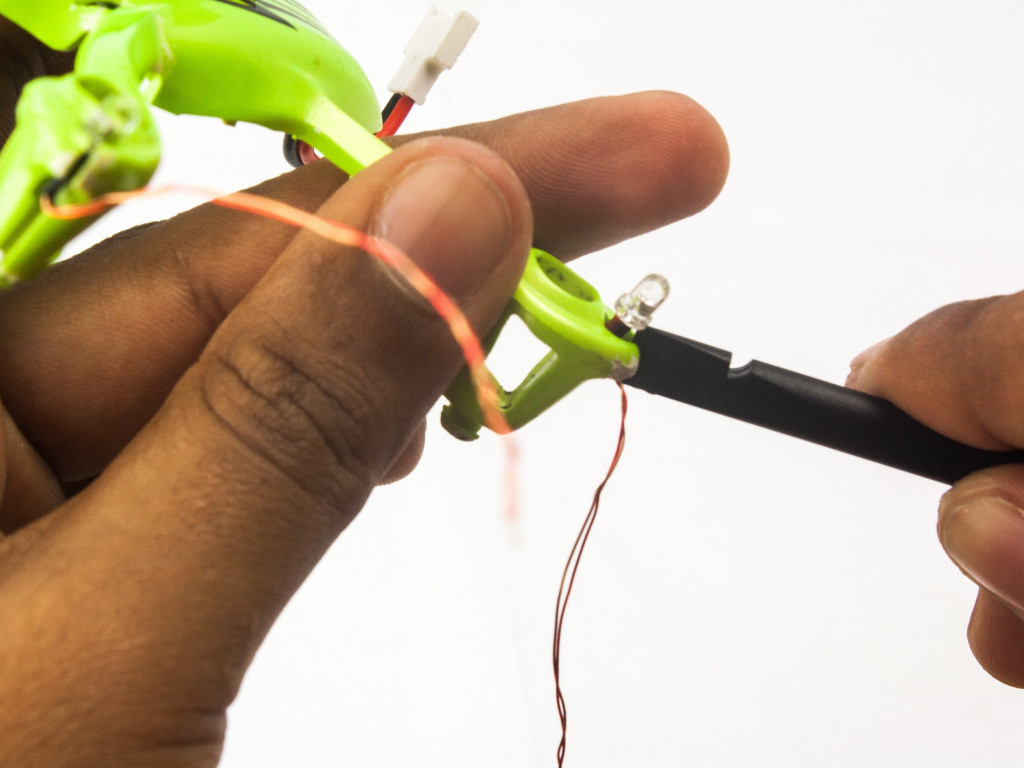
Шаг 11 Убрать светодиоды
Снимите светодиоды, используя spudger, чтобы расширить их корпус и подтолкнуть их вверх.
Чтобы освободить светодиод от корпуса, вставьте spudger в верхнюю часть зазора в пластике, открывая боковую сторону светодиода.
Одновременно поверните spudger, чтобы расширить корпус, одновременно толкая светодиод вверх и наружу рамы.

Шаг 12 Проверьте светодиоды


Шаг 13 Удалить контроллер полета
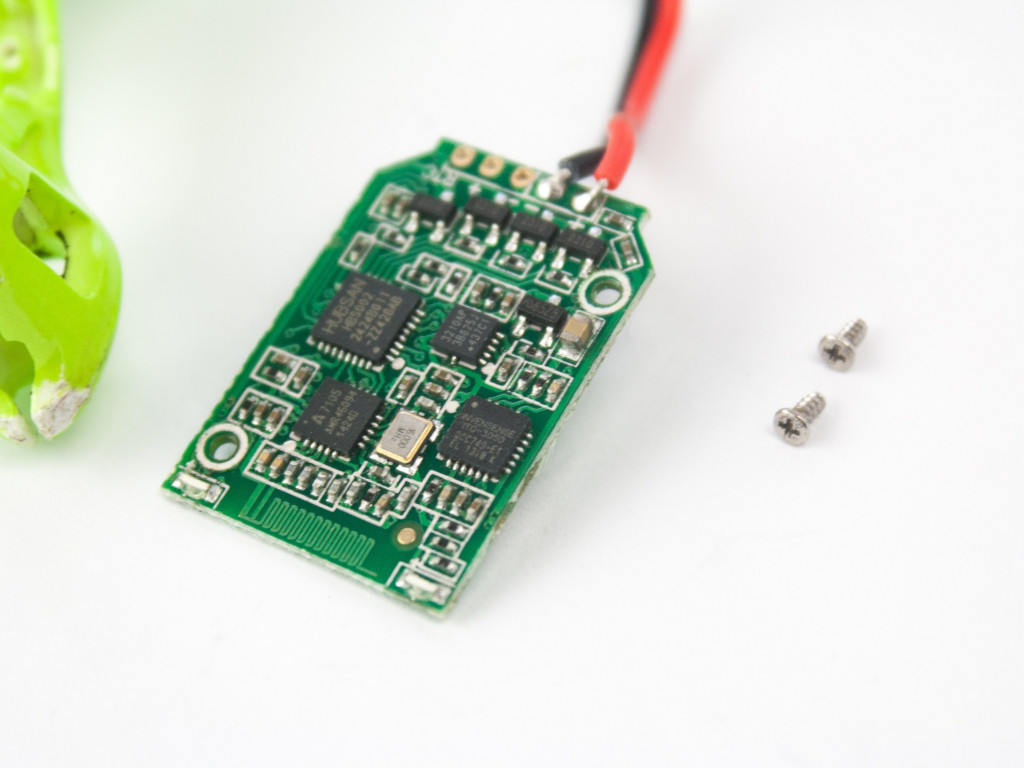
Используйте драйвер PH000, чтобы удалить два винта, которые крепят контроллер полета к раме.

Шаг 14 Проверьте полетный диспетчер
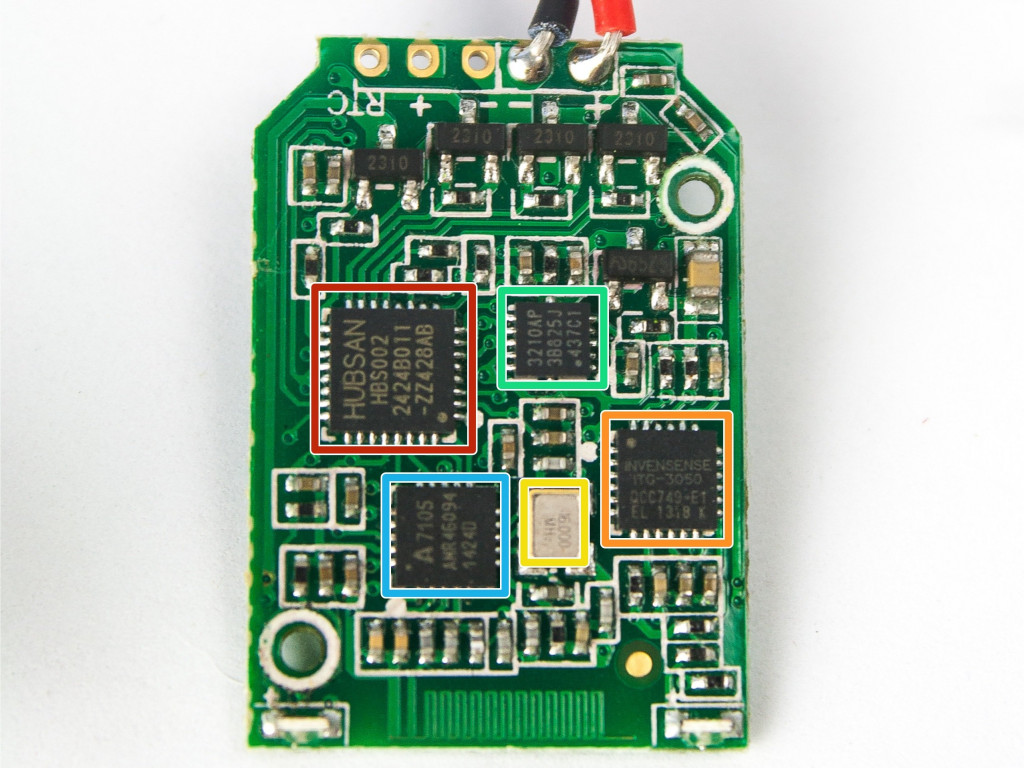
Контроллер полета Hubsan X4 (также известный как Control Board) имеет несколько аккуратных компонентов, которые удерживают квадрокоптер в воздухе:
Hubsan HBS002 Процессор
Invensense ITG-3050 Встроенный трехосный гироскоп
16000 МГц кварцевый кварцевый генератор
3210AP 3-осевой акселерометр
A7105 2,4 ГГц беспроводной модуль
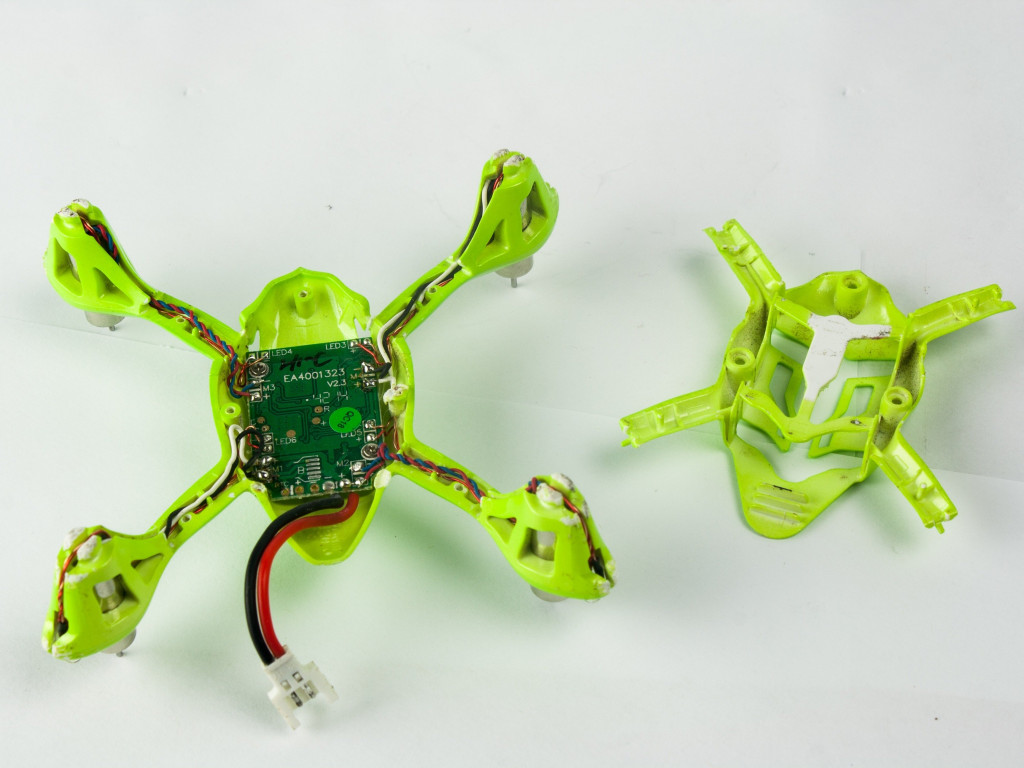
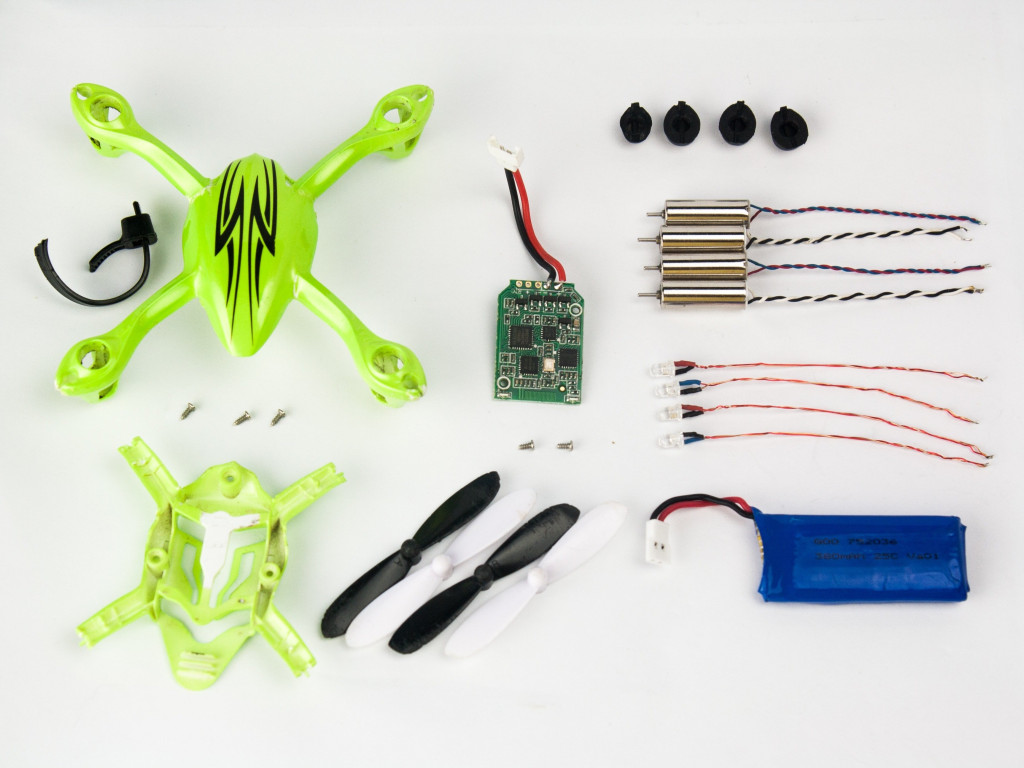
Шаг 15 Обзор деталей
Все сделано! Чтобы собрать X4, выполните следующие действия в обратном порядке.
Комментарии
Пока еще нет ниодного комментария, оставьте комментарий первым!